FIG. HKS · CROSS-PROJECT BLEED
The substrate is identical
The Heat Kernel Signature Kt(x, x) = Σi exp(-λi t) φi(x)²
is the diagonal readout of the same heat semigroup that drives SOGT+ V2 attention.
The Laplace–Beltrami operator on this ZForge mesh is the Dθ running inside the transformer.
One operator, two substrates.
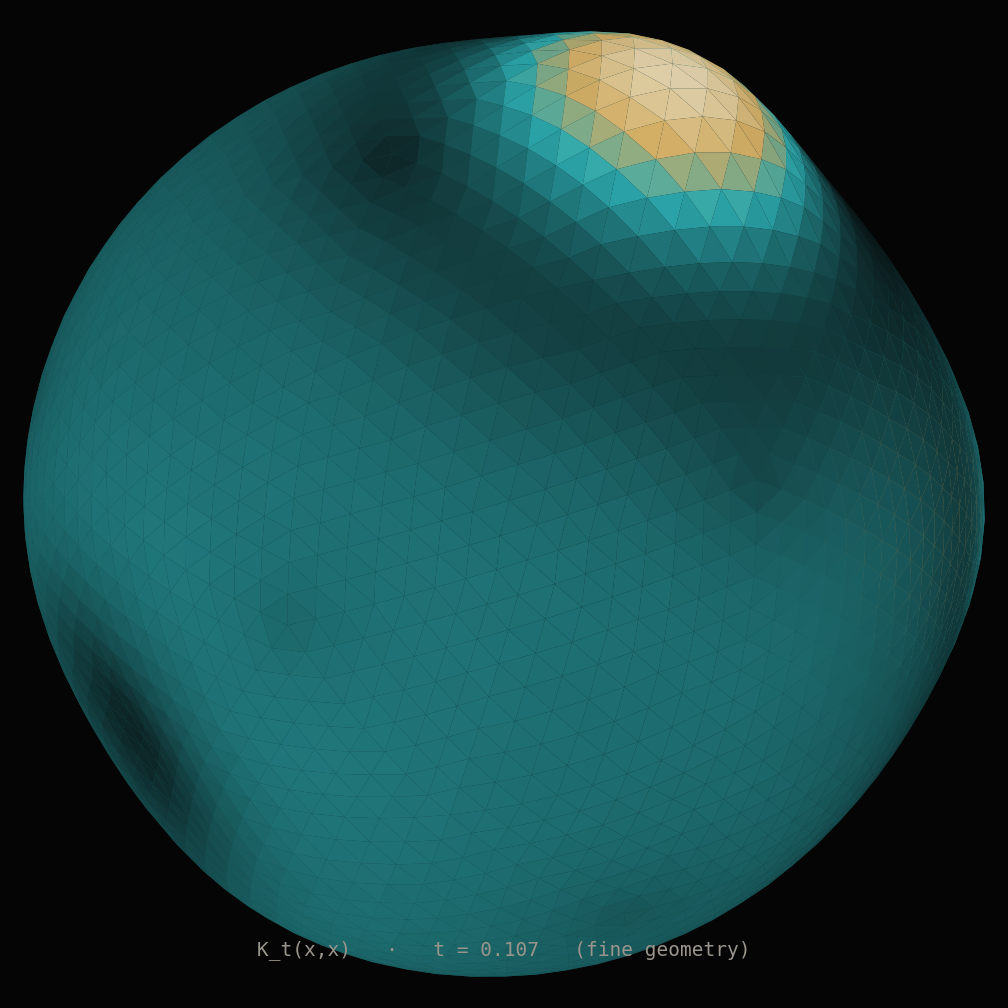
t small · fine geometry
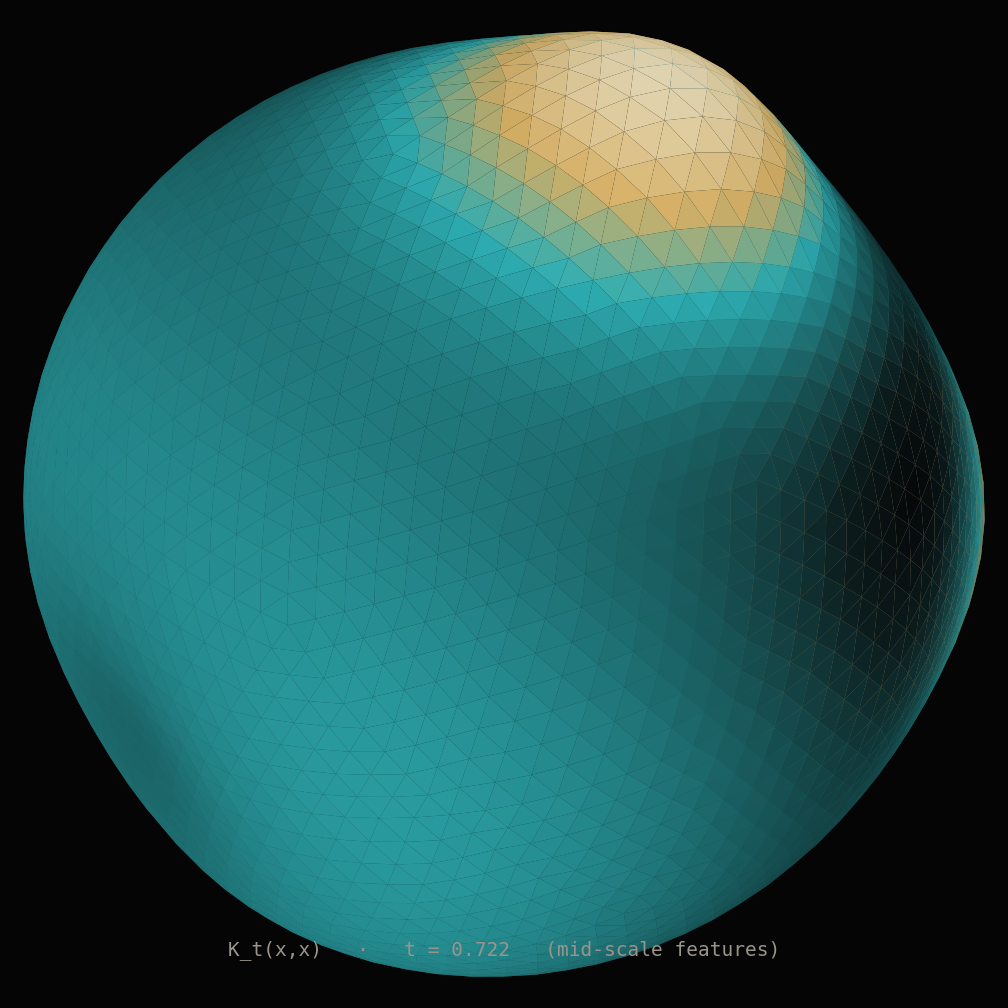
t medium · mid-scale features
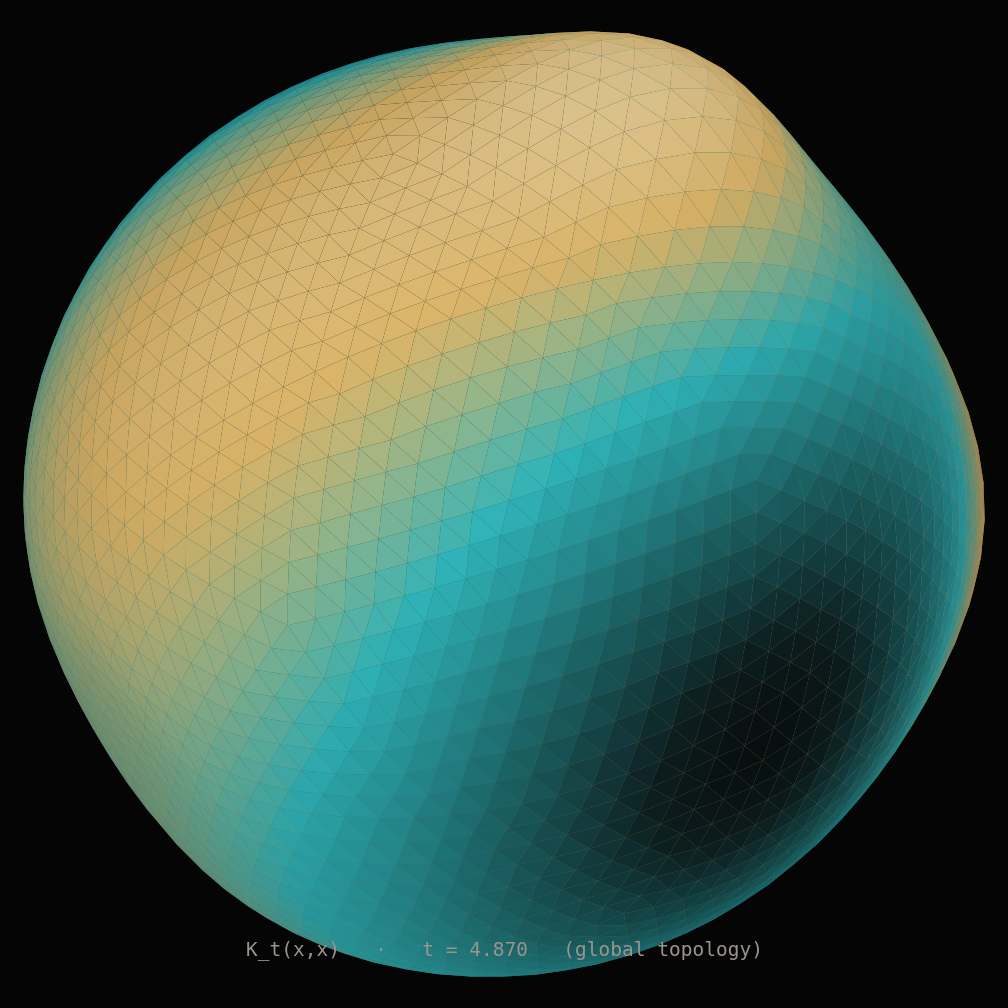
t large · global topology
FIG. HKS-SPEC · 96 lowest Laplace–Beltrami eigenvalues
· the same spectrum that, in a transformer, would specify the heat-kernel attention basis
▸ Each frame is the diagonal Kt(x, x) of the heat kernel at a different diffusion time, vertex-colored on the mesh. Small t reads off fine surface curvature; large t reads off global shape. Both readings come from one Laplacian operator and its 96 lowest eigenpairs — identical machinery to the transformer's spectral attention block.